简介
SMPL ,全称 Skinned Multi-Person Linear Model,是一套优雅而实用的三维人体参数化模型.
更白话一点:给它一份"骨架的姿态"(pose)和"一纸身形的刻度"(shape),它便能织出一张细腻的人体网格(成千上万的顶点),起落有致,动作流畅.Pose 决定关节如何开合回旋;Shape 勾勒高矮胖瘦的轮廓;再配上整体的平移与旋转,人物就稳稳落在世界坐标系中.
它之所以经久不衰,有两点朴素而关键的优势:
可微且线性友好,和深度学习模型同频共振;
扎根于大规模人体扫描数据,形体细节自然,少有违和的折痕.
应用场景也很广:三维人体重建,姿态估计,动作捕捉,AR/VR,动画制作……凡与"人"有关的 3D 任务,往往都有它的身影.
下面,我们沿着一条清晰的路径——从姿态到旋转,再到顶点——把 SMPL 温柔而彻底地拆开.
2. 数学预备
2.1 轴角表示法
在深入 SMPL 之前,先把"旋转"这件事说清楚:一根轴,一份角.轴告诉你"沿这条直线去绕",角则回答"要绕多少".有了它们,三维里的任何小转身都能被描述得干净利落.
轴(axis):一个单位向量 u = ( u x , u y , u z ) \boldsymbol{u} = (u_x, u_y, u_z) u = ( u x , u y , u z )
角度(angle):一个标量 θ \theta θ
例如 u = ( 0 , 0 , 1 ) \boldsymbol{u}=(0,0,1) u = ( 0 , 0 , 1 ) θ = 90 ∘ \theta=90^\circ θ = 9 0 ∘ z z z 90 ∘ 90^\circ 9 0 ∘
走到罗德里格斯公式之前,先认识一个小角色:叉乘矩阵(skew-symmetric matrix).它的巧思在于——把"u × v \boldsymbol{u} \times \boldsymbol{v} u × v
给定单位向量 u = ( u x , u y , u z ) \boldsymbol{u} = (u_x, u_y, u_z) u = ( u x , u y , u z )
[ u ] × = [ 0 − u z u y u z 0 − u x − u y u x 0 ]
[\boldsymbol{u}]_\times =
\begin{bmatrix}
0 & -u_z & u_y \\\
u_z & 0 & -u_x \\\
-u_y & u_x & 0
\end{bmatrix}
[ u ] × = 0 u z − u y − u z 0 u x u y − u x 0 于是就有 u × v = [ u ] × v \boldsymbol{u} \times \boldsymbol{v} = [\boldsymbol{u}]_\times \, \boldsymbol{v} u × v = [ u ] × v v ∈ R 3 \boldsymbol{v} \in \mathbb{R}^3 v ∈ R 3 [ u ] × [\boldsymbol{u}]_\times [ u ] ×
常用性质:
[ u ] × ⊤ = − [ u ] × , [ u ] × u = 0 .
[\boldsymbol{u}]_\times^\top = -[\boldsymbol{u}]_\times, \quad\quad [\boldsymbol{u}]_\times\, \boldsymbol{u} = \boldsymbol{0}.
[ u ] × ⊤ = − [ u ] × , [ u ] × u = 0 . 当 ∥ u ∥ = 1 \lVert \boldsymbol{u} \rVert = 1 ∥ u ∥ = 1
[ u ] × 2 = u u ⊤ − I .
[\boldsymbol{u}]_\times^{\,2} = \boldsymbol{u} \, \boldsymbol{u}^\top - \mathbf{I}.
[ u ] × 2 = u u ⊤ − I . 推导(用向量三重积 BAC–CAB 恒等式):对任意 v ∈ R 3 \boldsymbol{v} \in \mathbb{R}^3 v ∈ R 3
[ u ] × 2 v = [ u ] × ( [ u ] × v ) = u × ( u × v ) = u ( u ⋅ v ) − v ( u ⋅ u ) .
[\boldsymbol{u}]_\times^{\,2}\,\boldsymbol{v}
= [\boldsymbol{u}]_\times\big([\boldsymbol{u}]_\times\,\boldsymbol{v}\big)
= \boldsymbol{u}\times(\boldsymbol{u}\times\boldsymbol{v})
= \boldsymbol{u}\,(\boldsymbol{u}\cdot\boldsymbol{v}) - \boldsymbol{v}\,(\boldsymbol{u}\cdot\boldsymbol{u}).
[ u ] × 2 v = [ u ] × ( [ u ] × v ) = u × ( u × v ) = u ( u ⋅ v ) − v ( u ⋅ u ) . 由于 ∥ u ∥ = 1 \lVert\boldsymbol{u}\rVert=1 ∥ u ∥ = 1 u ⋅ u = 1 \boldsymbol{u}\cdot\boldsymbol{u}=1 u ⋅ u = 1
[ u ] × 2 v = u ( u ⋅ v ) − v = ( u u ⊤ − I ) v .
[\boldsymbol{u}]_\times^{\,2}\,\boldsymbol{v}
= \boldsymbol{u}\,(\boldsymbol{u}\cdot\boldsymbol{v}) - \boldsymbol{v}
= (\boldsymbol{u}\,\boldsymbol{u}^\top - \mathbf{I})\,\boldsymbol{v}.
[ u ] × 2 v = u ( u ⋅ v ) − v = ( u u ⊤ − I ) v . 因上式对任意 v \boldsymbol{v} v
[ u ] × 2 = u u ⊤ − I .
[\boldsymbol{u}]_\times^{\,2} = \boldsymbol{u}\,\boldsymbol{u}^\top - \mathbf{I}.
[ u ] × 2 = u u ⊤ − I . 小注:这也意味着 [ u ] × 2 [\boldsymbol{u}]_\times^{\,2} [ u ] × 2 u \boldsymbol{u} u 0 \mathbf{0} 0 u \boldsymbol{u} u − I -\mathbf{I} − I
有了它,罗德里格斯公式就水到渠成:围绕单位轴 u \boldsymbol{u} u θ \theta θ
R ( ω ) : = I + sin θ [ u ] × + ( 1 − cos θ ) [ u ] × 2 .
\mathbf{R}(\boldsymbol{\omega})
:= \mathbf{I} + \sin\theta\,[\boldsymbol{u}]_\times + (1-\cos\theta)\,[\boldsymbol{u}]_\times^{\,2}.
R ( ω ) := I + sin θ [ u ] × + ( 1 − cos θ ) [ u ] × 2 . 其中 ω = θ u \boldsymbol{\omega} = \theta\,\boldsymbol{u} ω = θ u
直观一点看:沿着 u \boldsymbol{u} u u \boldsymbol{u} u θ \theta θ
等价的"向量版"写法也很常见,对任意 v ∈ R 3 \boldsymbol{v} \in \mathbb{R}^3 v ∈ R 3
R ( u , θ ) v = cos θ v + sin θ ( u × v ) + ( 1 − cos θ ) ( u ⋅ v ) u .
\mathbf{R}(\boldsymbol{u},\theta)\,\boldsymbol{v}
= \cos\theta\,\boldsymbol{v}
+ \sin\theta\,(\boldsymbol{u}\times\boldsymbol{v})
+ (1-\cos\theta)\,(\boldsymbol{u}\cdot\boldsymbol{v})\,\boldsymbol{u}.
R ( u , θ ) v = cos θ v + sin θ ( u × v ) + ( 1 − cos θ ) ( u ⋅ v ) u . 3. 模型参数
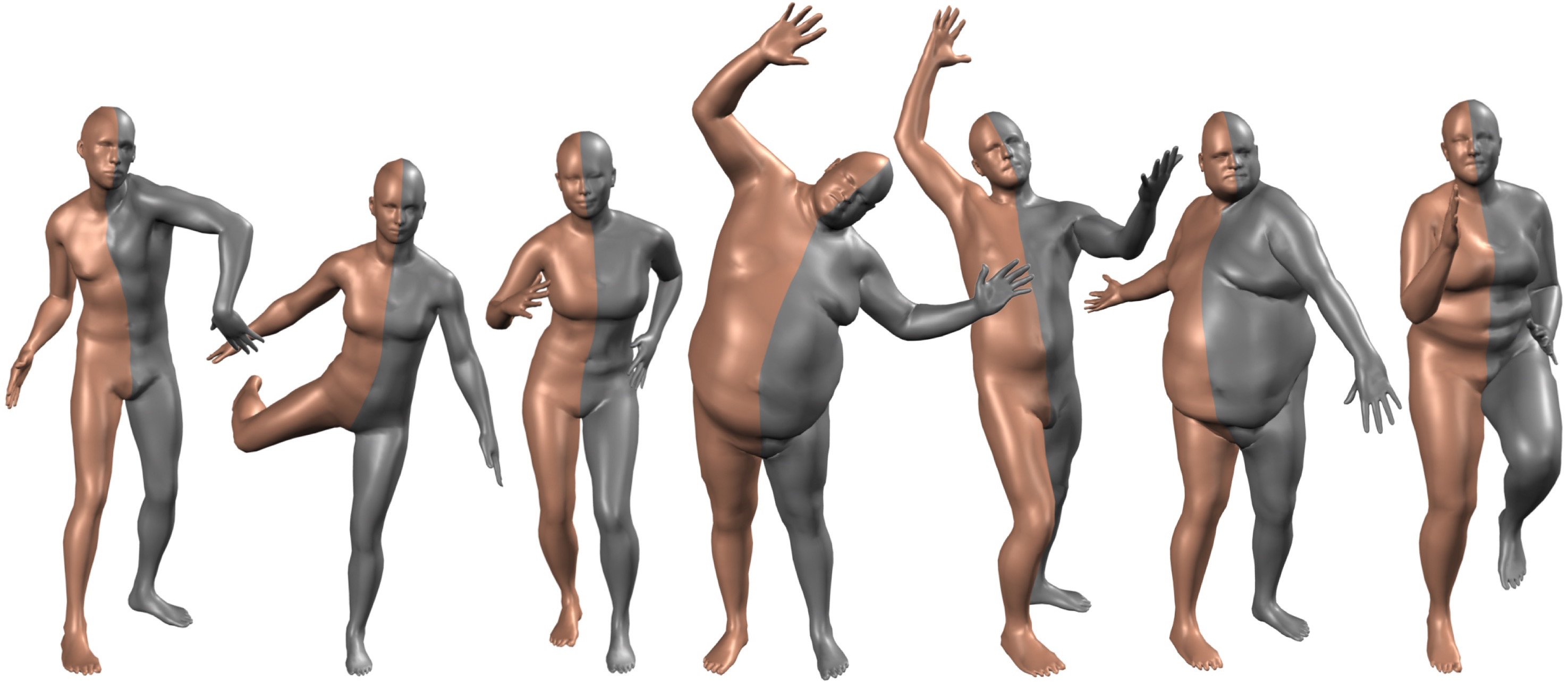
3.1 形状参数(β)
形状参数刻画"人"的体态与比例变化,可把它想象成一组推拉自如的滑块:身高,胖瘦,肩宽……轻轻调整,体型便随之细腻起伏.下文将在模板网格与形状基的框架中展开说明.
在 SMPL 中,模板网格(Template Mesh) 共有 N = 6890 N=6890 N = 6890 t i = ( x i , y i , z i ) t_i = (x_i, y_i, z_i) t i = ( x i , y i , z i )
将所有顶点按顺序"堆叠"起来,得到一条长向量:
T = { t 1 , t 2 , ⋯ , t 6890 } , T ∈ R 3 N .
T = \{t_1, t_2, \cdots, t_{6890}\},\quad T \in \mathbb{R}^{3N}.
T = { t 1 , t 2 , ⋯ , t 6890 } , T ∈ R 3 N . (也常把 T T T R N × 3 \mathbb{R}^{N\times 3} R N × 3
形状对模板的线性修正,按原论文记号为:
T ( β ) = T ˉ + B S ( β ) ,
T(\boldsymbol{\beta}) = \bar{T} + B_S(\boldsymbol{\beta}),
T ( β ) = T ˉ + B S ( β ) , 其中 T ˉ \bar{T} T ˉ B S ( β ) B_S(\boldsymbol{\beta}) B S ( β ) β \boldsymbol{\beta} β
等价地,也可写成 PCA 形状基的和式:
T ( β ) = T ˉ + ∑ k = 1 K β k S k .
T(\boldsymbol{\beta}) = \bar{T} + \sum_{k=1}^{K} \, \beta_k\, S_k.
T ( β ) = T ˉ + k = 1 ∑ K β k S k . 其中,β k \beta_k β k k k k S k S_k S k
小记:β = ( β 1 , … , β K ) ⊤ ∈ R K \boldsymbol{\beta} = (\beta_1,\dots,\beta_K)^\top \in \mathbb{R}^K β = ( β 1 , … , β K ) ⊤ ∈ R K S k ∈ R 3 N S_k \in \mathbb{R}^{3N} S k ∈ R 3 N K = 10 K=10 K = 10
补充:实际发布的 SMPL 亦提供 K = 10 K=10 K = 10 K = 300 K=300 K = 300
可以把 β \boldsymbol{\beta} β 滑块 ",每个滑块驱动一类典型的体型变化:
β 1 \beta_1 β 1
β 2 \beta_2 β 2
β 3 \beta_3 β 3
β 4 \beta_4 β 4
β 5 \beta_5 β 5
β 6 \beta_6 β 6
β 7 \beta_7 β 7
β 8 , β 9 , β 10 \beta_8,\beta_9,\beta_{10} β 8 , β 9 , β 10
3.2 姿态参数(θ)
共 24 个关节,每个关节用 3 个参数(旋转轴 + 角度)描述,合计 72 维:
θ ∈ R 72 .
\boldsymbol{\theta} \in \mathbb{R}^{72}.
θ ∈ R 72 . 为什么不是 4 个参数(四元数)?因为三维旋转群 SO(3) 只有 3 个自由度 ;四元数 q ∈ R 4 \boldsymbol{q}\in\mathbb{R}^4 q ∈ R 4 单位范约束 ∥ q ∥ = 1 \lVert\boldsymbol{q}\rVert=1 ∥ q ∥ = 1 q \boldsymbol{q} q − q -\boldsymbol{q} − q 轴—角(axis–angle) 用 3 维最小参数,回归更直接.
每个关节的参数是一个轴—角向量 .记第 i i i W i W_i W i θ i \theta_i θ i
ω i = θ i W i , W i ∈ R 3 , ∥ W i ∥ = 1.
\boldsymbol{\omega}_i = \theta_i\, W_i,\quad W_i \in \mathbb{R}^3,\ \lVert W_i\rVert = 1.
ω i = θ i W i , W i ∈ R 3 , ∥ W i ∥ = 1. 也可反过来由 ω i \boldsymbol{\omega}_i ω i
θ i = ∥ ω i ∥ , W i = { ω i / ∥ ω i ∥ , ∥ ω i ∥ > 0 , 任意单位向量 , 否则 .
\theta_i = \lVert\boldsymbol{\omega}_i\rVert,\quad W_i = \begin{cases}
\boldsymbol{\omega}_i/\lVert\boldsymbol{\omega}_i\rVert, & \lVert\boldsymbol{\omega}_i\rVert>0,\\
\text{任意单位向量}, & \text{否则}.
\end{cases}
θ i = ∥ ω i ∥ , W i = { ω i / ∥ ω i ∥ , 任意单位向量 , ∥ ω i ∥ > 0 , 否则 . 例如:绕 x x x W i = ( 1 , 0 , 0 ) W_i=(1,0,0) W i = ( 1 , 0 , 0 ) θ i \theta_i θ i
由罗德里格斯公式可得其旋转矩阵:
R ( θ i ) = I + sin θ i [ W i ] × + ( 1 − cos θ i ) [ W i ] × 2 .
R(\theta_i) = \mathbf{I} + \sin\theta_i\,[W_i]_\times + (1-\cos\theta_i)\,[W_i]_\times^{\,2}.
R ( θ i ) = I + sin θ i [ W i ] × + ( 1 − cos θ i ) [ W i ] × 2 . 4. 核心计算流程
4.1 正向运动学(FK)
我们可以把 FK 视为在一个骨骼链上,逐步叠加坐标系变换:
每个关节不仅有一个"位置",它还定义了一个坐标系.
子关节的位置和方向,总是依附在父关节的坐标系里.
父关节一旦动了,它的整个坐标系也跟着动,子关节就在新的坐标系里继续旋转.
核心公式:
G i = G parent ( i ) ⋅ T i
G_i = G_{\text{parent}(i)} \cdot T_i
G i = G parent ( i ) ⋅ T i G i G_i G i : 关于
i i i 的全局变换矩阵 (global transform).
G parent ( i ) G_{\text{parent}(i)} G parent ( i ) : 父关节的全局变换.
T i T_i T i : 关于
i i i 的本地变换矩阵 (local transform).
为避免与 T ( β , θ ) T(\boldsymbol{\beta},\boldsymbol{\theta}) T ( β , θ ) T i T_i T i T ˉ \bar{T} T ˉ T ( β , θ ) T(\boldsymbol{\beta},\boldsymbol{\theta}) T ( β , θ )
本地变换矩阵 T i T_i T i
每个关节有两个信息:
旋转 (姿态):由 ω i \boldsymbol{\omega}_i ω i R ( ω i ) R(\boldsymbol{\omega}_i) R ( ω i )
平移 (骨骼长度/位置):第 i i i j i \boldsymbol{j}_i j i
T i = [ R ( ω i ) j i 0 ⊤ 1 ]
T_i =
\begin{bmatrix}
R(\boldsymbol{\omega}_i) & \boldsymbol{j}_i \\
\mathbf{0}^\top & 1\\
\end{bmatrix}
T i = [ R ( ω i ) 0 ⊤ j i 1 ] R ( ω i ) R(\boldsymbol{\omega}_i) R ( ω i ) :描述旋转.
j i \boldsymbol{j}_i j i :相对于父关节的偏移位置.
递推关系:
假设根节点 (骨盆) 的全局矩阵:
G root = [ R ( ω root ) t root 0 1 ]
G_{\text{root}} =
\begin{bmatrix}
R(\boldsymbol{\omega}_{\text{root}}) & t_{\text{root}}\\
0 & 1\\
\end{bmatrix}
G root = [ R ( ω root ) 0 t root 1 ] 那么,上臂的全局变换矩阵为:
G upper_arm = G root ⋅ T upper_arm
G_{\text{upper\_arm}} = G_{\text{root}} \cdot T_{\text{upper\_arm}}
G upper_arm = G root ⋅ T upper_arm 前臂的全局变换矩阵为:
G lower_arm = G upper_arm ⋅ T lower_arm
G_{\text{lower\_arm}} = G_{\text{upper\_arm}} \cdot T_{\text{lower\_arm}}
G lower_arm = G upper_arm ⋅ T lower_arm 手腕的全局变换矩阵为:
G wrist = G lower_arm ⋅ T wrist
G_{\text{wrist}} = G_{\text{lower\_arm}} \cdot T_{\text{wrist}}
G wrist = G lower_arm ⋅ T wrist 4.2 线性混合蒙皮(LBS)
SMPL 的关键步骤之一.
可以把骨架(关节)想成木偶的"骨头",把网格顶点想成木偶表面的"橡皮泥".LBS 就是规定:当骨头动起来时,每个顶点该跟着哪些骨头,以多大比例一起动.
最核心的直觉是"加权平均的变换":一个顶点同时由多个关节影响,每个关节给它一个变换,这些变换按照权重做线性混合,得到顶点的新位置.
符号约定:
i i i j j j K K K K = 24 K=24 K = 24
w i j w_{ij} w ij j j j i i i w i j ≥ 0 w_{ij}\ge 0 w ij ≥ 0 ∑ j = 1 K w i j = 1 \sum_{j=1}^{K} w_{ij} = 1 ∑ j = 1 K w ij = 1
G j G_j G j j j j 4 × 4 4\times 4 4 × 4
v ˉ i \bar{v}_i v ˉ i
v i v_i v i
公式:
v i = ∑ j = 1 K w i j [ G j ( θ , J ) B j ( J ) − 1 ] v ˉ i
v_i = \sum_{j=1}^{K} w_{ij}\, \big[\, G_j(\boldsymbol{\theta}, \mathbf{J})\, B_j(\mathbf{J})^{-1} \,\big] \, \bar{v}_i
v i = j = 1 ∑ K w ij [ G j ( θ , J ) B j ( J ) − 1 ] v ˉ i 其中 B j B_j B j j j j J \mathbf{J} J J ( β ) J(\boldsymbol{\beta}) J ( β )
实践中,蒙皮权重 W \mathcal{W} W ∑ j w i j = 1 \sum_j w_{ij}=1 ∑ j w ij = 1
变量释义小结:
K K K 24 24 24
w i j w_{ij} w ij j j j i i i
G j G_j G j j j j
B j B_j B j j j j
v ˉ i \bar{v}_i v ˉ i
v i v_i v i
4.3 姿态修正
作用:给每个关节加入"补偿形变",让模型的表面更符合真实人体.
SMPL 将姿态引起的非线性形变线性化为一组姿态基的加权和:
B P ( θ ) = ∑ n = 1 9 K ( R n ( θ ) − R n ( θ ∗ ) ) P n
B_P(\boldsymbol{\theta}) = \sum_{n=1}^{9K} \big( R_n(\boldsymbol{\theta}) - R_n(\boldsymbol{\theta}^*) \big)\, \mathbf{P}_n
B P ( θ ) = n = 1 ∑ 9 K ( R n ( θ ) − R n ( θ ∗ ) ) P n 其中 R n ( θ ) R_n(\boldsymbol{\theta}) R n ( θ ) 3 × 3 3\times 3 3 × 3 n n n θ ∗ \boldsymbol{\theta}^* θ ∗ P n \mathbf{P}_n P n
5. 完整模型公式
M ( β , θ ) = W ( T P ( β , θ ) , J ( β ) , θ , W )
M(\boldsymbol{\beta}, \boldsymbol{\theta}) = W\big( T_P(\boldsymbol{\beta}, \boldsymbol{\theta}),\; J(\boldsymbol{\beta}),\; \boldsymbol{\theta},\; \mathcal{W} \big)
M ( β , θ ) = W ( T P ( β , θ ) , J ( β ) , θ , W ) 其中
T P ( β , θ ) = T ˉ + B S ( β ) + B P ( θ )
T_P(\boldsymbol{\beta}, \boldsymbol{\theta}) = \bar{T} + B_S(\boldsymbol{\beta}) + B_P(\boldsymbol{\theta})
T P ( β , θ ) = T ˉ + B S ( β ) + B P ( θ ) W \mathcal{W} W 为蒙皮权重矩阵(注意与函数
W ( ⋅ ) W(\cdot) W ( ⋅ ) 区分).
符号说明:
M ( β , θ ) M(\boldsymbol{\beta}, \boldsymbol{\theta}) M ( β , θ ) V ∈ R 3 N V \in \mathbb{R}^{3N} V ∈ R 3 N
T P ( β , θ ) T_P(\boldsymbol{\beta}, \boldsymbol{\theta}) T P ( β , θ ) T P = T ˉ + B S ( β ) + B P ( θ ) T_P = \bar{T} + B_S(\boldsymbol{\beta}) + B_P(\boldsymbol{\theta}) T P = T ˉ + B S ( β ) + B P ( θ )
T ˉ \bar{T} T ˉ
B S ( β ) B_S(\boldsymbol{\beta}) B S ( β ) ∑ k β k S k \sum_k \beta_k S_k ∑ k β k S k
B P ( θ ) B_P(\boldsymbol{\theta}) B P ( θ ) R i ( θ ) R_i(\boldsymbol{\theta}) R i ( θ )
J ( β ) J(\boldsymbol{\beta}) J ( β ) T ( β ) T(\boldsymbol{\beta}) T ( β )
θ \boldsymbol{\theta} θ 72 72 72 24 × 3 24\times3 24 × 3
W \mathcal{W} W w i j w_{ij} w ij j j j i i i ∑ j w i j = 1 \sum_j w_{ij}=1 ∑ j w ij = 1
W ( ⋅ ) W(\cdot) W ( ⋅ ) T P T_P T P G j ( θ , J ) G_j(\boldsymbol{\theta}, \mathbf{J}) G j ( θ , J ) B j ( J ) B_j(\mathbf{J}) B j ( J ) W \mathcal{W} W v i = ∑ j = 1 K w i j [ G j ( θ , J ) B j ( J ) − 1 ] v ˉ i v_i = \sum_{j=1}^{K} w_{ij}\,\big[\, G_j(\boldsymbol{\theta}, \mathbf{J})\, B_j(\mathbf{J})^{-1} \,\big] \, \bar{v}_i v i = ∑ j = 1 K w ij [ G j ( θ , J ) B j ( J ) − 1 ] v ˉ i
其中 J ( β ) J(\boldsymbol{\beta}) J ( β )
J ( β ) = J + J S β
J(\boldsymbol{\beta}) = \mathcal{J} + \mathcal{J}_S\, \boldsymbol{\beta}
J ( β ) = J + J S β 其中 J \mathcal{J} J J S \mathcal{J}_S J S
一句话直观总结:把"长相"和"动作"先分别算好(T P ( β , θ ) T_P(\boldsymbol{\beta}, \boldsymbol{\theta}) T P ( β , θ ) J ( β ) J(\boldsymbol{\beta}) J ( β ) W \mathcal{W} W M ( β , θ ) M(\boldsymbol{\beta}, \boldsymbol{\theta}) M ( β , θ )
6. 参考文献
Loper, M., Mahmood, N., Romero, J., Pons-Moll, G., & Black, M. J. (2015). SMPL: A Skinned Multi-Person Linear Model. ACM Transactions on Graphics , 34(6), 1–16. ACM DL